Основные понятия и аксиомы стати
Материальная точка.
Материальной точкой называют простейшую схематизацию материального тела, представляющую собой тело определенной массы, положение которого можно определить как положение геометрической точки.
В теоретической механике абсолютно все тела рассматриваются как совокупность взаимодействующих материальных точек.
Такую совокупность МТ называют механической системой материальных точек.
Изучение законов движения материальных точек рассматривает раздел Динамика теоретической механики, в котором решаются две основные задачи:
1. Расчет сил, действующих на материальную точку и определяющих закон ее движения.
2. Обратная задача, в которой по заданным силам.
Сила.
В статике рассматриваются следующие две основные задачи: 1) сложение сил и приведение системы сил, действующих на абсолютно твердое тело, к простейшему виду; 2) определение необходимых и достаточных условий равновесия действующих на абсолютно твердое тело систем сил.
Все тела в той или иной степени деформируемы. В тех случаях, когда этими деформациями можно пренебречь, тело рассматривается как абсолютно твердое, т. е. предполагается, что расстояния между любыми его точками остаются неизменными.
В статике рассматривают все тела как абсолютно твердые, но для краткости часто называют их твердыми телами или просто телами.
Если данное тело может получить любое перемещение в пространстве, то такое тело называется свободным. Примером свободного тела может служить снаряд, выпущенный из дула орудия.
Мера механического взаимодействия тел, определяющая интенсивность и направление этого взаимодействия, называется в механике силой.
Если в результате действия одного тела на другое происходит изменение движения, в частности изменение покоя другого тела, то тогда говорят о динамическом проявлении силы.
Силу, как и всякую векторную величину, будем обозначать какой-нибудь буквой
с чертой над ней, например  . Модуль данной силы, как и всякой
другой векторной вели чины, будем обозначать той же буквой, но без черты,
например F, или символом
. Модуль данной силы, как и всякой
другой векторной вели чины, будем обозначать той же буквой, но без черты,
например F, или символом .
.

Графически сила изображается направленным прямолинейным отрезком (со стрелкой), совпадающим по направлению с направлением силы (рисунок 1). Длина этого отрезка выражает в выбранном масштабе модуль силы, направление отрезка соответствует направлению силы, его начало совпадает с точкой приложения силы. Иногда на практике бывает удобно изображать силу так, что точка ее приложения является конец вектора силы – острие стрелки. ПрямаяСД, вдоль которой направлена сила, называется линией действия силы. Например, линия действия силы тяжести есть вертикаль, проходящая через центр тяжести тела.
Система сил.
Система сил это совокупность сил, действующих на механическую систему. Плоская система сил – это система сил, линии действия которых лежат в одной плоскости. Пространственная система сил – это система сил, линии действия которых не лежат в одной плоскости. Система сходящихся сил – это система сил, линии действия которых пересекаются в одной точке.
Уравновешенной системой сил, или системой сил, эквивалентной нулю, называется такая система сил, при действии которой на абсолютно твѐрдое тело оно находится в покое.
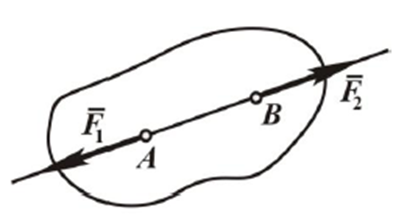
Рисунок 4 –Уравновешенная система сил
Все тела делятся на свободные и несвободные. Тело свободное, если его перемещения в пространстве ничем не ограничены. Тело, перемещения которого ограничены другими телами, называется несвободным, а тела, ограничивающие перемещения рассматриваемого тела, являются связями. Силы, с которыми связи действуют на данное тело, называются реакциями связей.
В механике пользуются принципом освобождаемости от связей: всякое несвободное тело можно рассматривать как свободное, если действие связей заменить силами – реакциями.
Моментом силы относительно точки (центра) называется вектор, численно равный произведению модуля силы на плечо, то есть на кратчайшее расстояние от точки до линии действия силы, и направленный перпендикулярно плоскости, проходящей через выбранную точку и линию действия силы в ту сторону, откуда вращение, совершаемое силой, представляется происходящим против хода часовой стрелки.
Момент силы характеризует еѐ вращательное действие. Момент силы относительно точки определяется как
где 0 – точка, относительно которой определяется момент;
F – сила;
h – плечо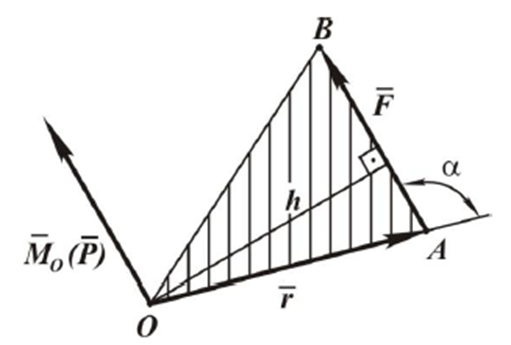
Рисунок 5 – Момент силы
Механическая работа– это количественная мера действия силы на тело или сил на систему тел. Зависит от численной величины и направления силы (сил) и от перемещения тела (системы тел).
где S – перемещение тела;
F – сила.
В Международной системе единиц измерения физических величин СИ единицей измерения работы является Джоуль, 1Дж = 1Нм.
Аксиома.
Все теоремы и уравнения статики базируются на нескольких исходных положениях, принимаемых без математических доказательств и называемых аксиомами. Аксиомы статики представляют собой результат знаний, накопленных человечеством, и отражают объективные процессы. Справедливость этих аксиом подтверждается многочисленными опытами и наблюдениями. Аксиома 1. Две силы ( и F2), действующие на свободное абсолютно твердое тело, находятся в равновесии тогда и только тогда, когда они равны по модулю и направлены вдоль одной прямой в противоположные стороны (рис. 1.3).
Аксиома 2. Действие данной системы сил на абсолютно твердое тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил. Следствие из аксиом 1 и 2. Точку приложения силы, действующей на абсолютно твердое тело, можно переносить вдоль ее линии действия в любую другую точку тела. Предположим, что в точке А к твердому телу приложена сила F (рис. 1.4). Приложим в точке В две силы Fx и Р2, равные по модулю силе F и направленные по ее линии действия в противоположные стороны. По аксиоме 2 можно отбросить уравновешенную систему сил F2 и F. В результате на тело теперь действует сила F\, равная силе F, но приложенная в точке В.
Аксиома 3. Две силы, приложенные к телу в одной точке, имеют равнодействующую, являющуюся диагональю параллелограмма, построенного на этих силах как на сторонах. Вектор R (рис. 1.5) представляет собой геометрическую сумму векторов Fx и F2: R = Fl+ F2. 8 Из аксиомы 3 следует, что равнодействующая двух сил, приложенных в одной точке, равна их геометрической сумме и приложена в той же точке.
Аксиома 4. Два материальных тела действуют друг на друга с силами, равными по величине и противоположно направленными. Такая система сил не является уравновешенной, так как силы приложены к разным телам.
Аксиома 5. Если деформируемое тело находится в равновесии под действием данной системы сил, то равновесие не нарушится, если тела станут абсолютно твердыми. Эта аксиома называется аксиомой затвердевания. Из аксиомы 5 следует, что это условие, являясь необходимым и для абсолютно твердого тела, и для деформируемого, не является для последнего достаточным. В разд. 2 будет рассматриваться достаточность равновесия деформируемых тел.