Плоская система сходящихся сил
При решении задач на сложение плоской системы сходящихся сил аналитическим способом необходимо: выбрать систему координатных осей х и у;найти углы каждой силы с координатными осями, а затем, определив проекции равнодействующей, найти ее модуль и направление.
Условие и уравнение равновесия.
Условия равновесия плоской системы сил. Для равновесия плоской системы сил необходимо и достаточно, чтобы главный векторСистема сходящихся сил.
Системой сходящихся сил (или пучком сил) называют такую систему сил, линии действия которых пересекаются в одной точке — центре пучка. Сходящиеся системы сил могут быть пространственными и плоскими, т. е. расположенными в одной плоскости.
Система сил, линии действия которых лежат в одной плоскости и пересекаются в одной точке, называется плоской системой сходящихся сил. Если силы сходящейся системы приложены к разным точкам тела, то по первому следствию из аксиом статики каждую силу можно перенести в точку пересечения линий действия и получить эквивалентную систему сил, приложенных к одной точке (рис. 2.1).
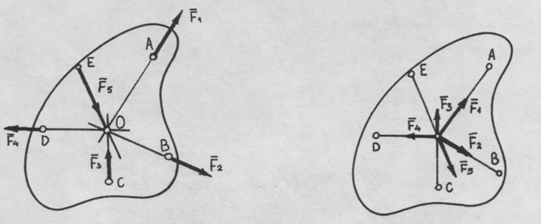
Рис. 2.1. Плоская система сходящихся сил
Две силы, приложенные к одной точке тела, образуют простейшую плоскую систему сходящихся сил (две пересекающиеся прямые всегда лежат в одной плоскости).
Рассмотрим систему сил приложенных в
точкеА. Требуется найти их равнодействующую (рис. 2.2).
приложенных в
точкеА. Требуется найти их равнодействующую (рис. 2.2).Применив правило силового треугольника, сложим силы
 и
и  Для этого из конца вектора
Для этого из конца вектора  отложим вектор
отложим вектор  и, соединив точки А и С,
получим геометрическую сумму (равнодействующую) сил F1 и F2
и, соединив точки А и С,
получим геометрическую сумму (равнодействующую) сил F1 и F2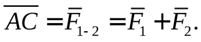
Геометрический и аналитический способ определения равнодействующей силы.
Геометрический способ заключается в построение силового многоугольника, аналитический – в определении суммы проекций всех действующих сил на две взаимноперпендикулярные оси.
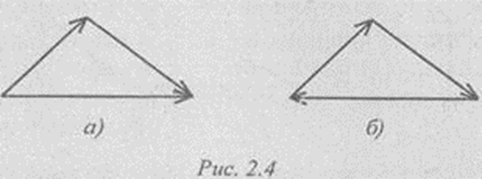
При графическом способе определения равнодействующей векторы сил можно вычерчивать в любом порядке, результат (величина и направление равнодействующей) при этом не изменится.
Вектор равнодействующей направлен навстречу векторам сил-слагаемых.
Порядок построения силового многоугольника
1. Выбираем полюс построения.
2. Помещаем в полюс начало первого вектора F2 (векторы сил можно вычерчивать в любом порядке) переместив его параллельно самому себе, сохранив его величину.
3. Помещаем в конец первого вектора начало второго F1 . Вычерчиваем один за другим в аналогичном порядке векторы остальных сил F4 , F3.
4. Вектор равнодействующей замыкает полученную ломаную линию;он соединяет начало первого вектора с концом последнего и направлен ему навстречу.
При изменении порядка вычерчивания векторов в многоугольнике меняется вид фигуры. На результат порядок вычерчивания не влияет.
Рекомендация. Обратить внимание на направление векторов.
Геометрическое условие равновесия ПССС: силовой многоугольник должен быть замкнут.
Равнодействующую системы сходящихся сил можно определить и аналитически (способом проекций). Для этого необходимо воспользоваться теоремой: проекция равнодействующей на данную ось равна алгебраической сумме проекций слагаемых сил на ту же ось.
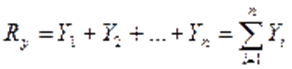
Проекции равнодействующей на координатные оси х и у определяются как суммы проекций составляющих.
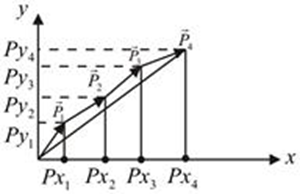
Рис. 4.11
Для удобства и простоты индекс и пределы суммирования ставить не будем:

Зная проекции, определяют модуль и направление
равнодействующей по формулам: 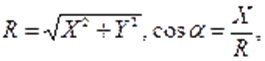
При решении задач на сложение плоской системы сходящихся сил аналитическим способом необходимо: выбрать систему координатных осей х и у;найти углы каждой силы с координатными осями, а затем, определив проекции равнодействующей, найти ее модуль и направление.
Условие и уравнение равновесия.
Условия равновесия плоской системы сил. Для равновесия плоской системы сил необходимо и достаточно, чтобы главный вектор и главный момент
и главный момент  этой системы относительно
любого произвольно выбранного центра О равнялись нулю, т. е.
этой системы относительно
любого произвольно выбранного центра О равнялись нулю, т. е.
В векторной форме условие (7.8)
применять для решения задач неудобно. Спроектировав уравнение (7.8) на оси
координат, получим вместе с (7.9) три следующих скалярных равенства:

Систему называют первой формой уравнений равновесия произвольной плоской системы сил, которая формулируется так: для равновесия плоской системы сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на каждую координатную ось (х, у) и алгебраическая сумма моментов этих сил относительно любой точки О, лежащей в плоскости действия сил, равнялись нулю.
Вторая форма уравнений равновесияформулируется так: для равновесия плоской системы сил необходимо и достаточно, чтобы алгебраические суммы моментов всех сил относительно двух произвольных точек А и В и алгебраическая сумма проекций всех сил на какую-либо ось х или у, не перпендикулярную прямой АВ, равнялись нулю, т. е.
 или
или 

Условие неперпендикулярности сил и прямой АВ также обязательно. В противном случае, одно из уравнений системы (7.11) или (7.12) не является независимым.
Третья форма уравнений равновесия формулируется так: для равновесия плоской системы сил необходимо и достаточно, чтобы алгебраические суммы моментов всех сил относительно трех произвольных точек А, В и С, не лежащих на одной прямой, равнялись нулю, т. е.
Если бы точки А, В и С лежали на одной прямой, то одно из уравнений не являлось бы независимым (его можно было получить из двух других путем тождественных преобразований). Решение задачи было бы равносильно решению системы двух уравнений с тремя неизвестными, что невыполнимо.
Все три формы уравнений равновесия совершенно равноправны. Отметим, что независимо от вида уравнений равновесия для плоской системы произвольно расположенных сил статика позволяет составить только три уравнения.
Условия равновесия плоской системы параллельных сил.Если силы перпендикулярны какой-либо оси х, то уравнение превращается в тождество
превращается в тождество 
Для определения неизвестных сил остается два уравнения равновесия, которые можно представить в двух формах.
Первая форма. Для равновесия плоской системы параллельных сил необходимо и достаточно, чтобы алгебраическая сумма всех сил и алгебраическая сумма моментов всех сил относительно произвольной точки О равнялись нулю, т. е.

Вторая форма. Для равновесия плоской системы параллельных сил необходимо и достаточно, чтобы алгебраические суммы моментов всех сил относительно двух произвольных точек А и В равнялись нулю, т.е.
Метод проекций.
Метод проекций, с помощью которого реализуется аналитический способ сложения любого числа сил, основан на применении следующей теоремы геометрии: проекция векторной суммы на любую ось равна алгебраической сумме проекций слагаемых векторов на ту же ось.
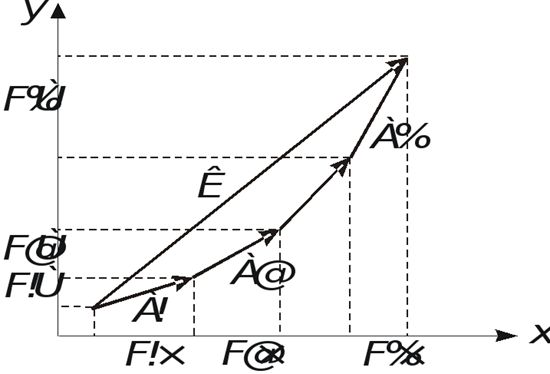
Иллюстрация метода проекций
Проекция сил на ось определяется отрезком оси, отсекаемой перпендикулярами, опущенными на ось из начала и конца вектора.
Величина проекции силы на ось равна произведению модуля силы на косинус угла между вектором силы и положительным направлением сил. Проекция имеет знак: положительный при одинаковом направлении вектора силы и оси и отрицательный при направлении в сторону отрицательной полуоси.
Проекция силы на две взаимно перпендикулярные оси.
Fx = Fcosα > 0
Fy = Fcosβ = Fsinα > 0
Величина равнодействующей равна векторной (геометрической) сумме векторов системы сил. Определим равнодействующую аналитическим способом. Выберем систему координат, определим проекции всех заданных векторов на эти оси. Складываем проекции всех векторов на оси х и у.
FΣx= F1x + F2x + F3x + F4x;
FΣy= F1y + F2y + F3y + F4y.
Модуль (величину) равнодействующей можно определить по известным проекциям:
Направление вектора равнодействующей можно определить по величинам и знакам косинусов углов, образуемых равнодействующими с осями координат:
Плоская система сходящихся сил находится в равновесии, если алгебраическая сумма проекций всех сил системы на любую ось равна нулю.
Система уравнений равновесия плоской системы сходящихся сил:
При решении задач координатные оси выбирают так, чтобы решение было наиболее простым. При этом желательно, чтобы хотя бы одна неизвестная сила совпадала с осью координат.
Связь и реакция.
Все тела делятся на свободные и связанные.
Свободные тела — это тела, перемещение которых не ограничено.
Связанные тела — это тела, перемещение которых ограничено другими телами.
Тела, ограничивающие перемещение других тел, называют связями.
Силы, действующие от связей и препятствующие перемещению, называют реакциями связей. Реакция связи всегда направлена с той стороны, куда нельзя перемещаться.
Всякое связанное тело можно представить свободным, если связи заменить их реакциями (принцип освобождения от связей).
Связи делятся на несколько типов.
Связь — гладкая опора (без трения) — реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре.
Гибкая связь (нить, веревка, трос, цепь) — груз подвешен на двух нитях. Реакция нити направлена вдоль нити от тела, при этом нить может быть только растянута.
Жесткий стержень — стержень может быть сжат или растянут. Реакция стержня направлена вдоль стержня. Стержень работает на растяжение или сжатие. Точное направление реакции определяют, мысленно убрав стержень и рассмотрев возможные перемещения тела без этой связи.
Возможным перемещением точки называется такое бесконечно малое мысленное перемещение, которое допускается в данный момент.
Шарнирная опора. Шарнир допускает поворот вокруг точки закрепления. Различают два вида шарниров.
Подвижный шарнир. Стержень, закрепленный на шарнире, может поворачиваться вокруг шарнира, а точка крепления может перемещаться вдоль направляющей (площадки). Реакция подвижного шарнира направлена перпендикулярно опорной поверхности, так как не допускается только перемещение поперек опорной поверхности.
Неподвижный шарнир. Точка крепления перемещаться не может.
Стержень может свободно поворачиваться вокруг оси шарнира. Реакция такой опоры проходит через ось шарнира, но неизвестна по направлению. Ее изображают в виде двух составляющих: горизонтальной и вертикальной (Rx, Ry).
Защемление, или «заделка». Любые перемещения точки крепления невозможны.
Под действием внешних сил в опоре возникают реактивная сила и реактивный момент Мz, препятствующий повороту.
Реактивная сила представляется в виде двух составляющих вдоль осей координат:
R = Rx + Ry.