Передачи вращательного движения
Классификация передач.
Каждая машина обычно состоит из трех частей: двигатель, передаточный механизм (или передача), исполнительный механизм.
 ПМ
ПМ
ИМ

 Передаточный механизм необходим для
согласования режима работы двигателя с режимом работы исполнительного механизма
(обычно - это согласование частот вращения и изменение вращающего момента).
Передаточный механизм необходим для
согласования режима работы двигателя с режимом работы исполнительного механизма
(обычно - это согласование частот вращения и изменение вращающего момента).
1.1 Основные кинематические и энергетические соотношения в передаче.
Р1, Т1, п1
1
П
- ведущий (входной) вал;
![]() 2 - ведомый (выходной) вал.
2 - ведомый (выходной) вал.
Р2, Т2, п2
![]() Передаточное отношение - отношение частот
вращения валов в направлении силового потока.
Передаточное отношение - отношение частот
вращения валов в направлении силового потока.
Если
 т.е. частота вращения падает, то передача считается понижающей (редуктор);
т.е. частота вращения падает, то передача считается понижающей (редуктор);Если
 т.е. частота вращения возрастает, то передача считается повышающей (мультипликатор).
т.е. частота вращения возрастает, то передача считается повышающей (мультипликатор).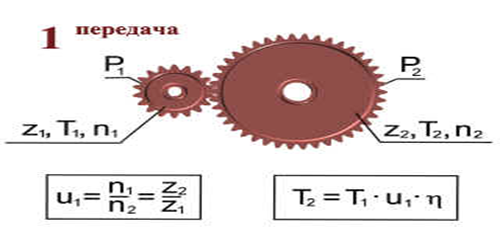
передача понижающая.
Частота вращения на ведомом валу:


частота вращения на ведомом валу уменьшается.
Вращающий момент на ведомом валу:
 вращающий момент на ведомом валу
увеличивается,
вращающий момент на ведомом валу
увеличивается,где
 КПД передачи (для зубчатой цилиндрической передачи 0,95 – 0,97).
КПД передачи (для зубчатой цилиндрической передачи 0,95 – 0,97).Мощность на ведомом валу:

мощность на ведомом валунеизбежно уменьшается (как в понижающей, так и в повышающей передаче), что, прежде всего, вызвано потерями энергии на трение.
Понижающие (редукторные) передачи позволяют уменьшать частоту вращения и увеличивать вращающий момент
и увеличивать вращающий момент
на ведомом (выходном) валу.
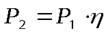
1.2. Классификация передач механической энергии.
Все передачи механической энергии можно разделить на два типа связей:
- Передачи гибкой связью (ПГС) – ремённые, цепные.
- Передачи непосредственным контактом – зубчатые, червячные, фрикционные.
2. Зубчатые передачи
Зубчатая передача предназначена для передачи вращательного движения между валами и преобразования движения с изменением угловых скоростей и моментов посредством зубчатого зацепления.
Зубчатые передачи используются в большинстве машин, в том числе в автомобилях, в приводах бурильных установок и т.д.
Достоинства ЗП:
- Высокий КПД.
- Надёжность работы и простота эксплуатации.
- Большие передаваемые нагрузки.
- Большая линейная скорость.
Недостатки ЗП:
- Сложность изготовления.
- Повышенные требования к точности монтажа и изготовления
- Шум во время работы.
Фрикционные передачи.
Фрикционная передача – передаточный механизм, располагающийся в приводах машин. Она используется для трансформации механической энергии по частоте вращения и передаваемым усилиям. Они позволяют осуществлять бесступенчатое регулирование скорости и отличаются высоким КПД. Фрикционные механизмы изучаются технической механикой и используются в промышленности.
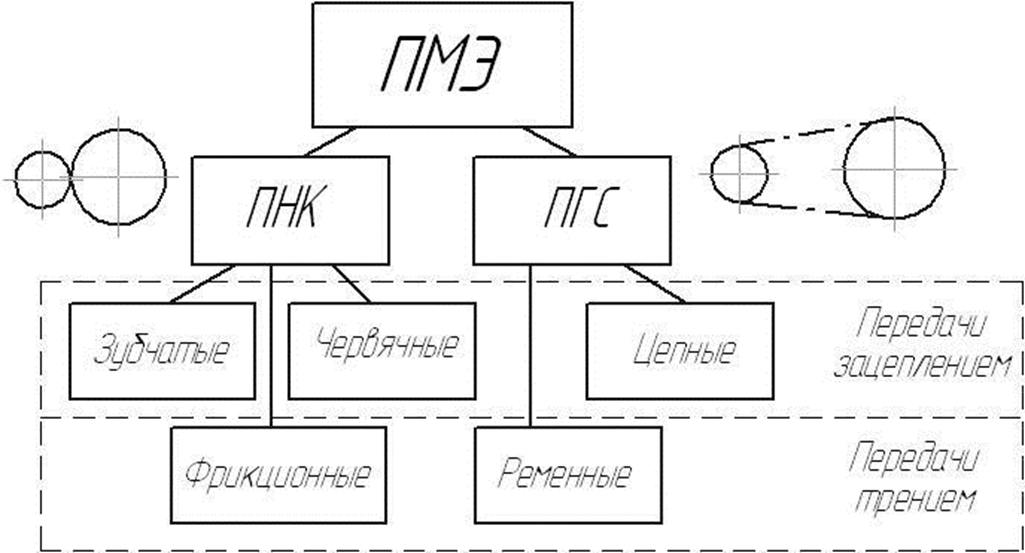
Фрикционные передачи состоят из 2 тел вращения: ведомого и ведущего катков, насаженных на валы. Передача вращательного движения производится посредством силы трения, появляющейся на площадках контакта рабочих тел под действием сил прижатия. Прижатие катков производится следующими способами:
1. Посредством гидроцилиндров. Используется во время больших нагрузок.
2. Собственным весом машины или ее узла.
3. При помощи комплексных рычажных механизмов.
4. С использованием центробежной силы. Применяется во время перемещения фрикционных звеньев в планетарных системах.
Важно, чтобы выполнялось следующее условие: сила трения должна быть больше или равна окружной силе. Нарушение данного принципа приводит к возникновению упругого и геометрического скольжения в месте соприкосновения рабочих тел вращения. В результате снижается угловая скорость ведущего катка, что приводит к буксованию фрикционных передач.
Многочисленные виды фрикционных механизмов отличаются назначением, характером изменения передаточного значения и конструкцией. Наибольшее применение в промышленности из них нашли фрикционные вариаторы. Они изготавливаются в виде отдельных агрегатов для привода машин и характеризуются переменным передаточным отношением. Выделяют следующие разновидности фрикционных вариаторов:
1. Лобовые: имеют упрощенную конструкцию и применяются универсально токарно-винторезных станках. Из-за низкой точности изготовления рабочих тел они быстро изнашиваются, что снижает КПД.
2. Торовые: оснащены дисками конусовидной формы и чашками в виде круглого тора. Данные механизмы обеспечивают равенство контактных напряжений и позволяют увеличить КПД и износоустойчивость инструмента.
3. Ременные: передача движения производится с применением закрытого кольцевого ремня с разными видами сечения (трапециевидным, круглым, прямоугольным, клиновым). Натяжение ремня производится при помощи приводных моторов, шкива, пружины или груза, выступающего в качестве противовеса.
4. Дисковые: смена скоростных характеристик производится посредством вращения двух дисков (фрикционов), расположенных на валах. Данный вид вариаторов не требует дополнительного обслуживания и функционирует при наличии синтетической смазки. Он не издает лишних шумов и плавно изменяет скорость вращения в заданном порядке.
Выбор определенного типа вариатора зависит от условий его работы: величины передаваемой мощности, требуемого диапазона регулирования, и минимальной частоты вращения валов. Эти характеристики указываются при изображении фрикционного механизма на кинематических схемах.
Основные характеристики фрикционной передачи
Для расчета фрикционной передачи необходимо учитывать следующие критерии
1. Передаточное число – величина, равная отношению числа зубьев ведомого и ведущего валов. Оно оказывает воздействие на скорость передачи крутящегося момента от мотора к приводу узла. Эта характеристика равна отношению угловых скоростей катков. Также передаточное количество можно выразить при помощи отношения частот вращения или диаметров катков. В большинстве фрикционных механизмов его значение меньше или равно 7.
2. КПД: указывает количество утраченных мощностей. Зависит от числа потерь во время качения и скольжения. Величина этого параметра рассчитывается экспериментальным методом, при помощи сравнения мощностей ведущего и ведомого валов. Средний КПД фрикционных механизмов равняется 90%.
3. Контактная прочность: характеризует способность передачи выдерживать крупные нагрузки. Оценивается при помощи контактного напряжения, возникающего в месте соприкосновения катков. Чем ниже контактная прочность конструкции, тем сильнее изменяется форма основных деталей во время соприкосновения. Рассчитать эту характеристику можно при помощи формулы Герца, где учитываются коэффициент нагрузки, приведенный радиус кривизны, модуль упругости и сила сжатия катков.
4. Тип движения катков: характеризует траекторию движения рабочих тел вращения. Оно может быть реверсивным и нереверсивным. При реверсивном движении рабочие тела вращения перемещаются в противоположных направлениях, что позволяет осуществлять передачу 2 путями. При нереверсивном движении катки движутся в 1 направлении. Передача производится только 1 единственным способом.
Материал тел качения – характеристика, влияющая на износостойкость устройство, контактную прочность, коэффициент трения и модуль упругости. Чаще всего при изготовлении деталей кинематической пары используется металлокерамика или сочетание стандартной и закаленной стали (закалка до 60 HRC). Эти материалы уменьшают габариты механизма и увеличивают величину КПД. При использовании чугуна катки смогут работать без использования смазки. Наиболее дешевым материалом являются фрикционные пластмассы и текстолит. Но они обладают низким КПД: 50%. Высокими показателями трения обладают валы с кожаным или деревянным покрытием. Минусом этих материалов является низкая контактная прочностьВ следующей таблице указана величина коэффициента трения для фрикционных передач из разных материалов:
|
Покрытая смазкой сталь |
0,04 – 0,05 |
|
Сталь с сухой поверхностью |
0,14 – 0,19 |
|
Фрикционная пластмасса с высушенной поверхностью |
0,36 – 0,46 |
|
Текстолит с высушенной поверхностью |
0,31 – 0,36 |
|
Металлокерамика с сухой поверхностью |
0,29 – 0,34 |
Эти факторы и характеристики учитываются при изображении фрикционной передачи на кинематических схемах.
Типы фрикционных передач
Специалисты выделяют надлежащие классификация фрикционных устройств:
1. По характеру изменения передаточного значения: нерегулируемые и регулируемые (фрикционные вариаторы). Передаточное число в нерегулируемых механизмах не изменяется. В регулируемых устройствах передаточное отношение постоянно меняется.
2. По способу прижатия тел вращения: с переменной или неизменной мощью. В механизмах, где валы соприкасаются с переменной мощью применяются вспомогательные нажимные приспособления.
3. По условиям функционирования механизмов: открытые и закрытые. Открытые передачи работают только при использовании смазочных материалов. Закрытые механизмы могут функционировать с сухой поверхностью.
В зависимости от местоположения валов эксперты выделяют 3 основных вида фрикционных передач:
1. Цилиндрическая: механизм с параллельными осями валов. Ее плоскости выполнены в форме цилиндра. Используется для передачи маленькой мощности. Данный вид передач производится с гладкими, вогнутыми или выпуклыми поверхностями. При использовании цилиндрических кинематических пар со звеньями клиновой формы трение уменьшается на 50%.
2. Коническая: механизм с пересекающимися осями валов. Оснащается дисками с конической поверхностью. Для ее функционирования не требуется прикладывать большую силу нажатия. Передачи этого типа могут быть как реверсивными, так и нереверсивными.
3. Лобовая: механизм с лобовой поверхностью и перекрещивающимися осями валов. По причине интенсивного скольжения она содержит невысокий коэффициент полезного воздействия. Предоставляет возможность изменять направление движения и интенсивность вращения валов. Этот тип передачи применяется в маломощных устройствах.
Ременные и цепные передачи
Ременная передача. Ременную передачу широко применяют для передачи движения между удаленными друг от друга валами. Она осуществляется посредством шкивов, закрепленных на валах, и надетых на эти шкивы одного плоского либо одного или нескольких клиновых ремней (рис. 65, а, б, в, г). Первая называется плоскоременной, вторая — клиноременной передачей.
По сравнению с зубчатой ременная передача имеет ряд преимуществ и недостатков.
Преимуществами являются возможность осуществлять передачу на значительные расстояния, эластичность привода, смягчающая колебания и нагрузки и предохраняющая от значительных перегрузок (за счет проскальзывания), плавность хода и бесшумность работы.
К недостаткам относятся меньшая компактность, непостоянство передаточного отношения (из-за скольжения ремня на шкивах), большое давление на валы и подшипники, немного меньший коэффициент полезного действия.
Плоские ремни изготовляют из кожи, хлопчатобумажных и прорезиненных тканей. Для создания замкнутой гибкой связи их сшивают. Клиновые ремни изготовляют замкнутыми — цельными определенной длины. Эти ремни обеспечивают хороший контакт со шкивом в желобе и плавную безударную передачу.
Передача усилий обеспечивается только при нормально натянутых ремнях, для этого ремни периодически перешивают или устанавливают специальные устройства, автоматически регулирующие натяжение.
Плоскоременная передача бывает открытая (см. рис. 65, в), направление вращения ведомого вала при которой совпадает с направлением вращения ведущего вала, и перекрестная (см. рис. 65, г), изменяющая направление вращения ведомого вала на обратное. На продольно-строгальных станках некоторых типов применяют два вида ременной передачи — открытую и перекрестную ременные передачи.



Рис. 65. Схемы ременной передачи:
а — плоским ремнем, б — клиновым ремнем, в — открытая, г — перекрестная
Окружные скорости ведомого и ведущего шкивов имеют одинаковые скорости. Окружные скорости в м/мин ведущего d1 и ведомого d2 шкивов рассчитывают по формулам:

где v1 — окружная скорость ведомого шкива, м/мин; n2— число оборотов в минуту ведомого шкива; n1 — число оборотов в минуту ведущего шкива; d1 — диаметр ведущего шкива, мм; d2 — диаметр ведомого шкива, мм; 1000 — число для перевода миллиметров в метры; ε — коэффициент скольжения (равен 0,01—0,02).
Передаточное отношение между ведущими и ведомым шкивами выражается формулой i = d1/d2; (50)
с учетом проскальзывания ремня эта формула будет иметь вид:

Мощность на ведомом валу определяют по формуле N2 = N1 η квт, (52)
где N2 — мощность на ведомом валу, квт; N1 — мощность на ведущем валу, квт; η — к. п. д. ременной передачи, учитывающей силовые (трение) и скоростные (скольжение) потери (равен 0,97). Крутящий момент определяют по формуле

Цепная передача. Цепи так же, как и ремни, применяют для передач между валами, удаленными друг от друга.
Для цепных передач станков применяют цепи двух конструкций: втулочно-роликовые (рис. 66, а) и бесшумные (рис. 66, б).
Вторые применяют для передач больших крутящих моментов. Цепная передача состоит из двух звездочек и цепи. Зубья звездочки исключают проскальзывание цепи, и передаточное отношение, как и зубчатой передачи, будет выражаться формулой i = z1 / z2 , (54)
где z1 — число зубьев ведущей звездочки; z2 — число зубьев ведомой звездочки.
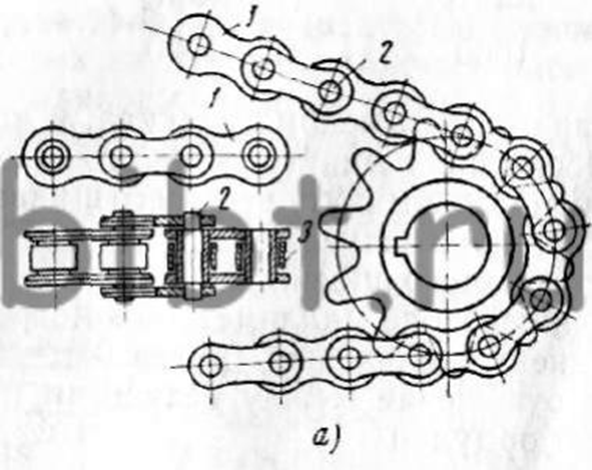

Рис. 66. Устройство цепных передач:
а — втулочно-роликовой: 1 — щека, 2 — ось, 3 — ролик; б — бесшумной цепи с вкладышами
Червячные передачи.
Червячная передача (рис. 5.1) относится к передачам зацепления с перекрещивающимися осями валов. Угол перекрещивания обычно равен 90°. Возможны и другие углы, отличные от 90°, однако такие передачи применяют редко.
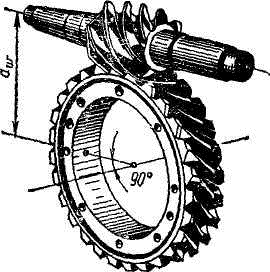
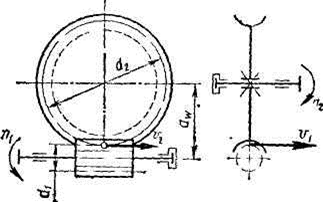
Рис.5.1
Рис.5.2
Движение в червячных передачах преобразуется по принципу винтовой пары или по принципу наклонной плоскости.
Достоинства, недостатки и применение червячных передач
Достоинства: 1. Плавность и бесшумность работы. 2. Компактность и сравнительно небольшая масса конструкции. 3. Возможность большого редуцирования, т. е. по лучения больших передаточных чисел (в отдельных случаях в несиловых передачах до 1000).
4. Возможность получения самотормозящей передачи, т. е. допускающей передачу движения только от червяка к колесу. Самоторможение червячной передачи позволяет выполнить механизм без тормозного устройства, препятствующего обратному вращению колеса.
Недостатки: 1. Сравнительно низкий К. П. Д. вследствие скольжения витков червяка по зубьям колеса. 2. Значительное выделение теплоты в зоне зацепления червяка с колесом.
3. Необходимость применения для венцов червячных колес дефицитных антифрикционных материалов. 4. Повышенный износ и склонность к заеданию.
Применение. Червячные передачи применяют при небольших и средних мощностях, обычно не превышающих 100 кВт. Применение передач при больших мощностях неэкономично из-за сравнительно низкого К. П. Д.и требует специальных мер для охлаждения передачи во избежание сильного нагрева.
Червячные передачи широко применяют в станках, прокатном оборудовании, подъемно-транспортных машинах, троллейбусах и т. д.
При проектировании передач, состоящих из зубчатых и червячных пар, червячную пару рекомендуется применять в качестве быстроходной ступени, так как при увеличении окружной скорости червяка создаются более благоприятные условия для образования устойчивого масляного клина в червячном зацеплении и, следовательно, уменьшаются потери на трение.
Червячные передачи во избежание их перегрева предпочтительно использовать в приводах периодического (а не непрерывного) действия.
Классификация червячных передач
В зависимости от формы внешней поверхности червяка (рис. 5.2) передачи бывают с цилиндрическим (а) или с глобоидны м (б) червяком.
Глобоидная передача имеет повышенныйК. П. Д., более надежна и долговечна, но из-за сложности изготовления имеет ограниченное применение.
В зависимости от направления линии витка червяка червячные передачи бывают с правым и левым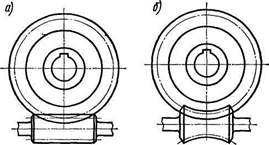
направлением линии витка.
Рис. 5.2. Схемы червячных передач
В зависимости от числа витков (заходов резьбы) червяка передачи бывают с одновитковым или с многовитковым червяком.
В зависимости от расположения червяка относительно колеса (рис. 5.3)
передачи бывают с нижним (а), боковым (б) и верхним (в) червяками.
Чаще всего расположение червяка диктуется условиями компоновки изделия. Нижний
червяк обычно применяется при окружной скорости червяка  4 м/с.
4 м/с.
В зависимости от формы винтовой поверхности резьбы цилиндрического червяка передачи бывают с архимедовым, конволютным и эвольвентным червяками.
Рис. 5.3. Схемы расположения червяка относительно колеса
Каждый из них требует особого способа нарезания.
Если резец, имеющий в сечении форму трапеции (рис. 5.4), установить на станке так, чтобы верхняя плоскость резца А—А проходила через ось червяка, то при нарезании получится винтовая поверхность, которая в сечении, перпендикулярном оси червяка, даст кривую —а
рис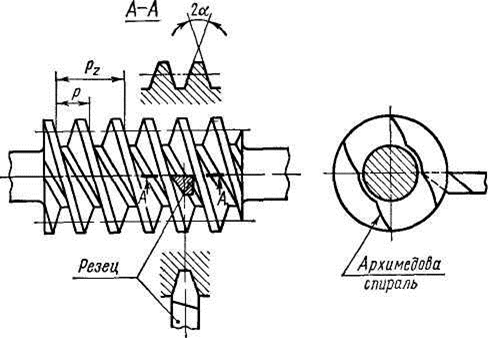
рхимедову спираль. Червяк с такой винтовой поверхностью называют архимедовым. Архимедов червяк в осевом сечении имеет прямолинейный профиль равнобедренной трапеции, аналогичный инструментальной рейке. Угол между боковыми сторонами профиля витка у стандартных чер
вяков 2а = 40°.
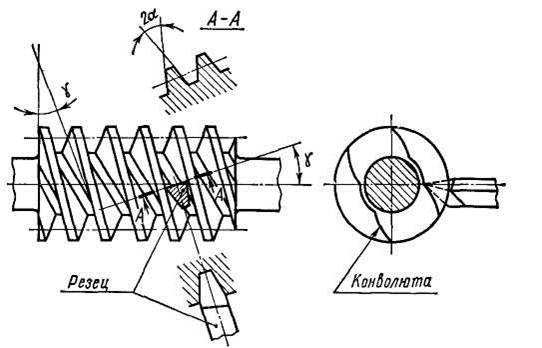
Рис. 5.4. Схема установки инструмента
п
Рис. 5.5 . Схема установки инструмента при нарезании конволютного червяка
ри нарезании архимедова червяка
Если тот же резец повернуть на угол подъема винтовой линии червяка Y (рис. 5.5) так, чтобы верхняя плоскость резца А—А была перпендикулярна винтовой линии, то при нарезании получится винтовая поверхность, которая в сечении, перпендикулярном оси червяка,
даст кривую – конволюту (укороченную эвольвенту окружности) , а червяк соответственно будет называться конволютным.
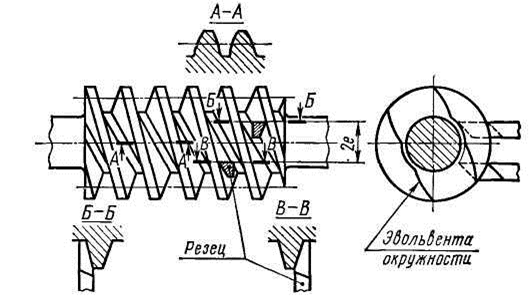
Рис. 5.6. Схема установки инструмента при нарезании эвольвентного червяка
Редуктора.
Редуктором называют механизм, выполненный в виде самостоятельного агрегата с целью понижения частоты вращения ведущего вала и увеличения вращающего момента на ведомом валу.
Редуктор состоит из зубчатых или червячных передач, установленных в отдельном герметичном корпусе, что принципиально отличает его от зубчатой или червячной передачи, встроенной в исполнительный механизм или машину.
Редукторы широко применяют в приводах различных рабочих машин в разных отраслях машиностроения, поэтому число разновидностей их велико (рис. 19.1, а — м). Соединение редуктора с двигателем и рабочей машиной осуществляют с помощью муфт или ременных и цепных передач (см. рис. 9.2).
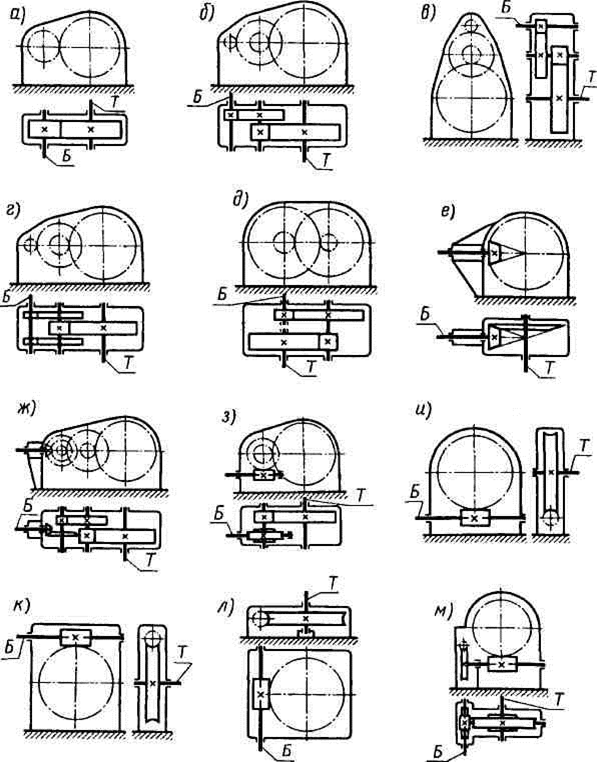
Рис. 19.1. Кинематические схемы редукторов: Б — быстроходный вал; Т— тихоходный вал
Широко применяют мотор-редукторы,
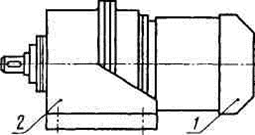
п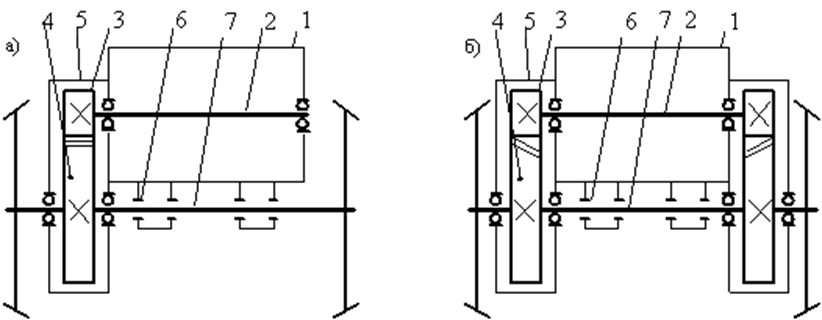 редставляющие собой объединенныев одно целое фланцевый
высокоскоростной электродвигатель и редуктор (рис. 19.2), служащий для
повышения вращающего момента. Мотор-редукторы экономичнее и имеют
более высокие КПД и пусковой момент, чем обычные тихоходные
высо-комоментные электродвигатели.
редставляющие собой объединенныев одно целое фланцевый
высокоскоростной электродвигатель и редуктор (рис. 19.2), служащий для
повышения вращающего момента. Мотор-редукторы экономичнее и имеют
более высокие КПД и пусковой момент, чем обычные тихоходные
высо-комоментные электродвигатели.
19.2. Классификация редукторов
Редукторы классифицируют по типам, типоразмерам и исполнениям.
Тип редуктора определяют по виду применяемых зубчатых передач и порядку их размещения в направлении от быстроходного вала к тихоходному, по числу ступеней и по расположению геометрической оси тихоходного вала в пространстве.
Для обозначения применяемых зубчатых передач используют прописные буквы: Ц — цилиндрические, К — конические, КЦ — коническо-цилиндрические, Ч —червячные, ЧЦ — червячно-цилиндрические, ЦЧ — цилиндрическо-червячные, Г — глобоидные, П — планетарные, В — волновые.
По числу ступеней различают редукторы одноступенчатые, двухступенчатые, трехступенчатые. Если число одинаковых передач две и более, то в обозначении редуктора после буквы ставят соответствующую цифру.
Широкий редуктор обозначают буквой Ш, узкий — У, соосный — С. В мотор-редукторах к обозначению впереди добавляют букву М (МП — мотор-редуктор с планетарной зубчатой передачей).
По расположению геометрической оси тихоходного вала в пространстве различают редукторы горизонтальные, вертикальные и универсальные. Наиболее распространены редукторы с валами, расположенными в горизонтальной плоскости, и поэтому они специального обозначения не имеют (у червячных редукторов валы перекрещиваются, оставаясь горизонтальными).
Так, например, на рис. 19.1, ж показана схема редуктора типа КЦ2 — коническо-цилиндрического трехступенчатого редуктора с одной конической и двумя цилиндрическими передачами, все валы которых расположены в горизонтальной плоскости.
Если все валы редуктора расположены в одной вертикальной плоскости, то к обозначению типа добавляют индекс В. Если ось тихоходного вала вертикальна, то добавляют индекс Т, если ось быстроходного вала вертикальна — индекс Б.
Например, на рис. 19.1, в приведена схема редуктора типа Ц2В— цилиндрического двухступенчатого, все валы которого расположены в вертикальной плоскости, а на рис. 19.1, л показана схема редуктора типа Чт — червячного одноступенчатого с вертикальной осью тихоходного вала.
Типоразмер редуктора определяется типом и главным размером (параметром) тихоходной ступени.
Для цилиндрической, червячной и глобоидной передач главным параметром является межосевое расстояние ат конической — внешний делительный диаметр колеса de2, планетарной — радиус водила Rw, волновой — внутренний диаметр гибкого колеса d в неде-формированном состоянии. Все приведенные параметры измеряются в миллиметрах.
Другими параметрами зубчатых редукторов являются коэффициент ширины зубчатых колес, модули (торцовые или нормальные) зубчатых колес, углы наклона зубьев, а для червячных редукторов дополнительно — коэффициент диаметра червяка.
Исполнение редуктора определяют передаточное число, вариант сборки и форма концевых участков валов (цилиндрическая, коническая).
Так, например, типоразмер приведенного выше редуктора (см. рис. 19.1, ж) с межосевым расстоянием тихоходной ступени «„,= 180 мм и передаточным числом и = 5в имеет обозначение КЦ2-180-56. В полном обозначении дополнительно указывают форму концов валов (предпочтительно коническую), климатическое исполнение и др.
Основная энергетическая характеристика редуктора — номинальный вращающий момент Т2 на тихоходном валу.
Показателем технического уровня редуктора является удельная масса у—отношение массы (кг) редуктора к номинальному вращающему моменту Т2 (Н • м) на выходном валу. Чем меньше у, тем выше технический уровень редуктора.
Значения у, кг/(Н • м), для одноступенчатых редукторов при Т2 = 315 Н • м: червячного— 0,14; конического — 0,12; цилиндрического — 0,095; планетарного — 0,085; волнового — 0,063.
Значения у, кг/(Н-м), для двухступенчатых редукторов при Г2=1000 Нм: коническо-цилиндрического — 0,1; цилиндрического по развернутой схеме — 0,085; соосного — 0,070.
В конструкциях с цементованными и закаленными зубьями можно получить у = 0,03...0,05 кг/(Н • м).
Передачи и приводы подвижного состава железнодорожного транспорта.
Тяговая передача предназначена для канализации потока мощности от вала тягового двигателя к колесной паре. Это сложный механический узел, входящий в состав тягового привода локомотива и состоящий из одного или нескольких, последовательно соединенных, передаточных механизмов (валы, муфты, редукторы) [ ].
Конструкция тяговой передачи во многом является определяющей с точки зрения уровня воздействия колес на путь с одной стороны, а с другой стороны динамических сил и моментов на тяговый двигатель – и далее на систему электромеханического преобразования энергии. Поэтому основные требования, предъявляемые к тяговым передачам можно сформулировать следующим образом:
- высокая степень эксплуатационной готовности;
- низкий уровень динамических моментов в передаточном механизме;
- минимально возможная неподрессоренная масса;
- минимум затрат на обслуживание и ремонт.
Тяговые приводы классифицируются в зависимости от степени подрессоривания тягового двигателя, т.е. различаются устройством тяговой передачи. Различают следующие типы (классы) тяговых приводов:
- привод с опорно-осевым подвешиванием тягового двигателя и редуктора (привод первого класса);
- привод с опорно-рамным подвешиванием тягового двигателя и опорно-осевым тяговым редуктором (привод второго класса);
- привод с опорно-рамным подвешиванием тягового двигателя и редуктора (привод третьего класса).
В приводе первого класса тяговый двигатель расположен параллельно оси колесной пары и с одной стороны жестко опирается на ее ось через два моторно-осевых подшипника. С другой стороны тяговый двигатель опорными выступами через пружинную подвеску или резиновые амортизаторы подвешивается к раме тележки. Ведущая шестерня тягового редуктора устанавливается на консоли вала якоря тягового двигателя или выполняется заодно с ним (рис.5.1, а). В зацепление с шестерней входит зубчатое колесо, жестко установленное на оси колесной пары. На электровозах, ввиду большей осевой мощности, привод выполняется с использованием двухстороннего тягового редуктора (рис.5.1, б).
Преимущества тягового привода первого класса:
- легкость изготовления, монтажа и обслуживания;
- низкие затраты на производство и жизненный цикл;
- ремонтопригодность;
- способность обеспечения максимального передаточного отношения, что особенно важно для грузового подвижного состава.
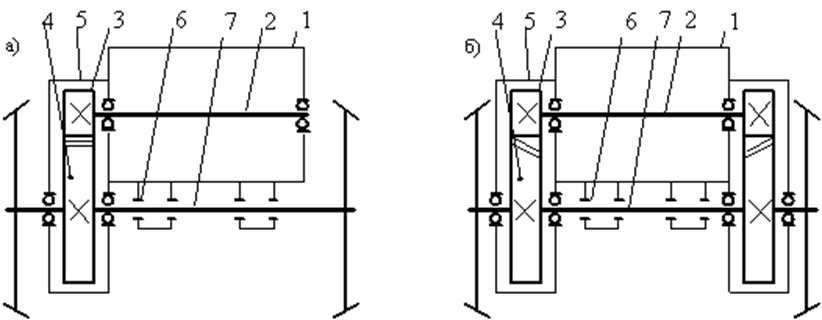
Рис. 5.1. Тяговый привод первого класса: а) с односторонним тяговым редуктором; б) с двухсторонним тяговым редуктором:1 – тяговый двигатель; 2 – вал ротора; 3 – шестерня редуктора; 4 – зубчатое колесо; 5 – корпус редуктора; 6 – моторно-осевые подшипники; 7 – ось колесной пары.
В качестве недостатков такого привода отмечаются:
- большая неподрессоренная масса, вызывающая повышенное динамическое воздействие на путь;
- высокий уровень динамического воздействия на тяговый двигатель и редуктор;
- использование моторно-осевых подшипников скольжения, неравномерный износ которых приводит к нарушению зацепления зубчатой передачи и преждевременному выходу ее из строя.
Перечисленные достоинства и недостатки обусловили применение приводов первого класса на грузовых и универсальных локомотивах с конструкционной скоростью до 120км/ч.
В приводе второго класса тяговый двигатель установлен на раме тележки. Тяговый редуктор жестко установлен на оси колесной пары и соединен с рамой тележки реактивной тягой. Конструкции тягового привода второго класса отличаются в основном типом передаточного механизма соединяющего вал тягового двигателя. Основными типами являются:
- муфта установленная между тяговым двигателем и редуктором – муфта поперечной компенсации (рис. 5.2, а);
- торсионный вал, проходящий внутри полого вала ротора тягового двигателя – муфта продольной компенсации. (рис.5.2, б).
По сравнению с приводом первого класса, привод второго класса обладает рядом преимуществ, таких как:
- сниженная (за счет установки тягового двигателя на раме тележки) неподрессоренная масса;
- установка тягового двигателя на раме тележки изолирует его от ударов и вибрации со стороны пути;
- жесткий корпус редуктора, обеспечивает работу зубчатой передачи без перекосов с постоянством межосевого расстояния.
Недостатками привода второго класса являются:
- наличие высоконагруженных узлов трения и шарниров в передаточных механизмах;
- высокий уровень динамических моментов в передаче, вследствие несовершенства ее кинематической схемы;
- наличие жестких габаритных ограничений;
- наличие несущего корпуса редуктора, передающего реактивный момент на раму тележки.
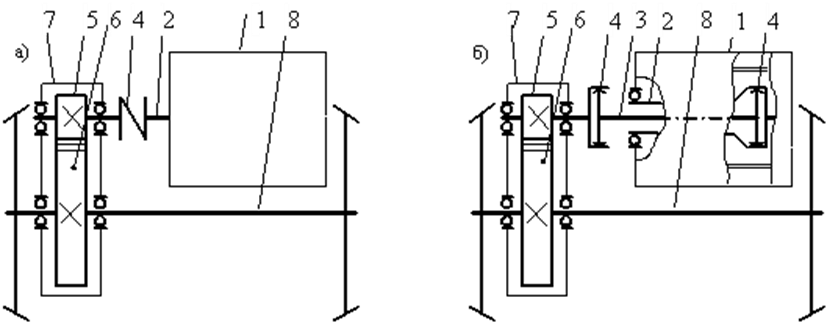
Рис.5.2. Тяговый привод второго класса: а) с муфтой установленной между тяговым двигателем и редуктором; б) с торсионом, проходящим через полый вал ротора: 1 – тяговый двигатель; 2 – вал ротора тягового двигателя;
3 – торсион; 4 – муфта; 5 – шестерня редуктора; 6 – зубчатое колесо;
7 – корпус редуктора; 8 – ось колесной пары.
Привод второго класса применяется на пассажирском тяговом и моторвагонном подвижном составе, предназначенном для движения со скоростями до 180…200 км/ч.
В приводе третьего класса тяговый двигатель и редуктор установлены на раме тележки. При этом зубчатое колесо редуктора соединяется с колесной парой через шарнирно-поводковые тяговые муфты и полый карданный вал, охватывающий ось колесной пары.
Наиболее распространены следующие устройства приводов третьего класса:
- привод с раздельно установленным двигателем и редуктором (рис.5.3, а). Здесь шестерня редуктора установлена на консоли вала ротора, а зубчатое колесо на цапфе корпуса тягового двигателя. Передача момента на колесную пару осуществляется полым валом с шарнирно-поводковыми муфтами;
- привод с интегрированным моторно-редукторным блоком (рис.5.3, б). В таком устройстве зубчатое колесо установлено на подшипниках расположенных в корпусе редуктора, шестерня редуктора выполнена заодно с валом тягового двигателя, который одним концом опирается на подшипник в корпусе редуктора, а другим на подшипник в противоположном подшипниковом щите. При этом тяговый двигатель и редуктор интегрируются в единый моторно-редукторный блок. Передача момента осуществляется аналогично предыдущему варианту.
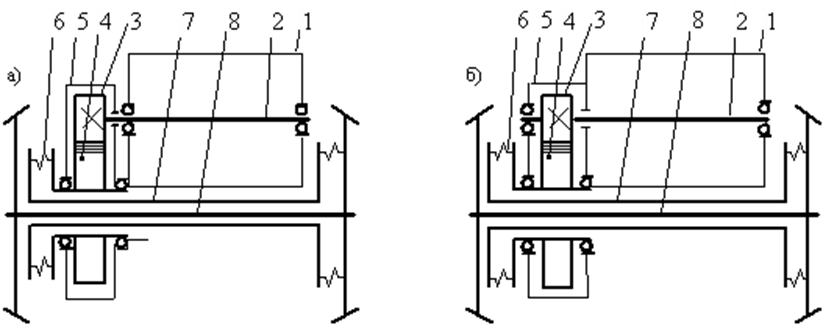
Рис.5.3. Тяговый привод третьего класса: а) с раздельно установленным двигателем и редуктором, б) с интегрированным моторно-редукторным блоком: 1 – ТЭД; 2 – вал ротора ТЭД; 3 – шестерня редуктора; 4 – зубчатое колесо;
5 – корпус редуктора; 6 – шарнирно- поводковая муфта;
7 – полый вал; 8 – ось колесной пары.
Преимущества привода третьего класса:
- низкая неподрессоренная масса, определяемая в основном массой колесной пары и элементов трансмиссии, обуславливающая минимальное динамическое воздействие на путь;
- низкие динамические нагрузки на элементы привода.
Недостатки:
- сложность конструкции;
- жесткие габаритные ограничения, в частности по приближению к верхнему строению пути;
- увеличенная централь привода приводит к уменьшению реализуемого передаточного отношения редуктора;
- расходы на производство, обслуживание и ремонт.
Привод третьего класса применяется на подвижном составе в движении со скоростями до 300км/ч.