Плоская система произвольно расположенных сил
Пара сил, моменты пары сил.
Парой сил называется система двух равных по модулю, параллельных и противоположно направленных сил, действующих на абсолютно твердое тело (рис. 1.27).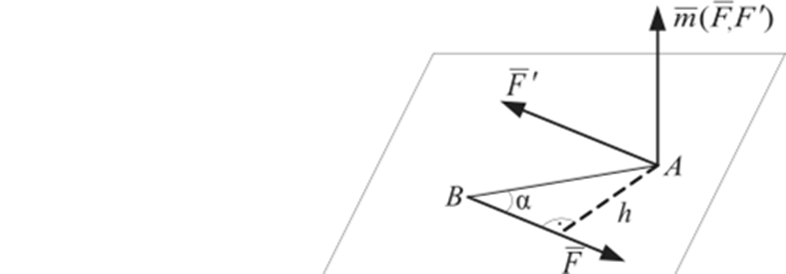
Рис. 1.27
Свойства пары сил как особой меры механического взаимодействия тел должны быть рассмотрены особо.
Плоскость, проходящая через линию действия пары сил, называется плоскостью действия пары.
Расстояние d между линиями действия пары сил называется плечом пары. Действие пары сил на твердое тело сводится к некоторому вращательному эффекту, который характеризуется величиной, называемой моментом пары.
Момент пары определяется:
• модулем Fd;
• положением в пространстве плоскости действия пары;
• направлением поворота пары в этой плоскости.
Моментом пары сил т называется вектор, модуль которого равен произведению одной из сил пары на ее плечо и который направлен перпендикулярно плоскости действия пары в ту сторону, откуда пара видна стремящейся повернуть тело против хода часовой стрелки.
Вектор момента пары сил равен векторному моменту одной из сил пары относительно точки приложения другой силы.
Теорема. Момент пары равен сумме моментов относительно любого центра О сил, образующих пару:
Докажем это. Из произвольного центра проведем радиус-векторы г а = ОА, г в = ОВ (рис. 1.28).
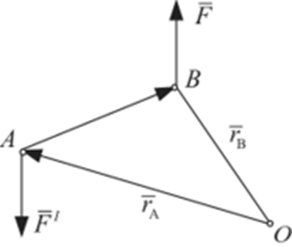
Рис. 1.28

Основные свойства пар (правила их эквивалентного преобразования) даются следующими тремя теоремами:
Теорема 1. Две пары сил, лежащие в одной плоскости, эквивалентны, если равны их алгебраические моменты, т. е. модули, взятые с определенным знаком.
Следствие. Пару сил можно перемещать в плоскости действия, изменяя величину плеча и сил, сохраняя ее момент.
Теорема 2. Пару сил можно переносить в любую плоскость, параллельную плоскости ее действия.
Следствие из теоремы 1 и 2. Две пары сил эквивалентны, если равны их векторные моменты.
Действительно, доказывая теорему о сумме моментов сил пары относительно центра, мы этот центр О выбираем произвольно. Вектор т можно считать приложенным в любой точке, т.е. этот вектор свободный.
Теорема 3. Две пары, лежащие в пересекающихся плоскостях, эквивалентны одной паре, момент которой равен геометрической сумме моментов составляющих пар.
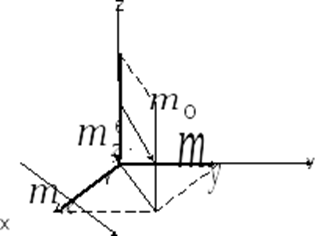
Из теоремы следует, что любую систему пар можно заменить одной парой, момент которой равен сумме моментов составляющих пар. Следовательно, если на тело действует несколько пар с моментами
_ _ _ _ п _
т,т2,...,т„, то их сумма эквивалентна одному моменту М = ^/и,.
(=1
Условие равновесия системы пар
Для равновесия системы пар, действующих на твердое тело, необходимо и достаточно, чтобы сумма моментов пар равнялась нулю.
п п
Для пространственной системы пар: = 0, для плоской: = 0.
/=1 /=1
Момент силы относительно точки.
Для характеристики вращательного движения под действием силы вводится понятие момента силы относительно точки.
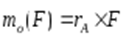
Моментом силы относительно точки называется вектор равный
векторному произведению радиуса-вектора
равный
векторному произведению радиуса-вектора  соединяющего
центр O с точкой приложения силы точки А, на саму силу
соединяющего
центр O с точкой приложения силы точки А, на саму силу  .
.
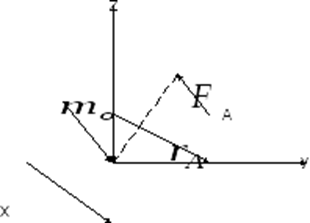
Момент силы относительно центра в плоскости.
Сила F в плоскости XOY
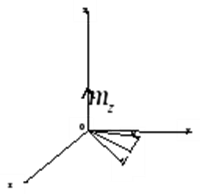

Момент
 направлен
вдоль осиOZ
направлен
вдоль осиOZ алгебраическое
значение момента в плоскости системы сил и модуль
алгебраическое
значение момента в плоскости системы сил и модуль определяется численно
удвоенной площадью ∆ OAB
определяется численно
удвоенной площадью ∆ OAB
где h-плечо
Вычислим аналитически.
Пусть заданы проекции радиус-вектора
аналитически.
Пусть заданы проекции радиус-вектора  и
проекция силы
и
проекция силы 
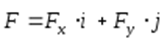
Раскроем векторные произведения по формуле векторной алгебры:

 единичные орты
единичные орты

где  координаты
координаты  на оси
на оси 
неподвижная декартовая
система координат. Можно задать значения координат точки для каждого момента времени.

Уравнение движения точки в координатной форме
Эти уравнения являются параметрическими уравнениями траектории точки
Векторный способ задания движения
Движение точки при
векторном способе изучения движения задается радиус-вектором  этой точки.
этой точки.
 - векторное
уравнение движения точки
- векторное
уравнение движения точки
Пусть  задает
движение точки М, тогда при изменении
задает
движение точки М, тогда при изменении 
точка опишет кривую в пространстве. Эта кривая является траекторией точки.
Скорость точки направлена по касательной к траектории и вычисляется по формуле
Уровнение:
Момент силы относительно оси.
Будем называть проекцию на эту ось вектора момента т.е.
т.е.  на
оси
на
оси 
С помощью формулы (2) момент силы относительно оси можно вычислить, зная проекции силы и координаты точки ее приложения.
Зная момент силы относительно осей можно
определить модуль момента силы
можно
определить модуль момента силы 


2) Определение
Поступательным движением твердого тела называется такое его движение, при котором любой отрезок, связанный с этим телом, сохраняет неизменное направление в пространстве.
При поступательном движении все точки тела имеют в каждый момент времени одинаковые перемещения.
Траектории, описываемые точками твердого тела, одинаковы.
Теорема: При поступательном движении твердого тела траектории, скорости и ускорения всех точек тела одинаковы.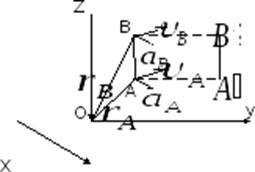
Док-во: выберем две точки А и В твердого тела радиусы векторов этих точек удовлетворяют условию:
Где АВ=const
Продифференцируем это уравнение:

получим:

Продифференцируем по времени:
 Т.Е.
Т.Е.  и т.д
и т.д
Для описания поступательного движения тела достаточно знать движение его одной точки.
Уравнения движения точки будут уравнениями движения всего тела. Часто этой одной точкой является центр масс твердого тела. Движение точки в пространстве описывается тремя независимыми уравнениями:
Для плоского случая:

Поступательное движение не накладывает условий на уравнение движения, точки могут описывать какие угодно траектории—как прямолинейные, так и криволинейные.
Основное свойство поступательного движения твердого тела определяется теоремой:
При поступательном движении твердого тела все его точки описывают одинаковые траектории и в каждый момент времени имеют одинаковые по величине и направлению скорости и ускорения.
Приведение к точке системы сил.
Рассмотрим случай переноса силы в произвольную точку,не лежащую на линии действия силы.
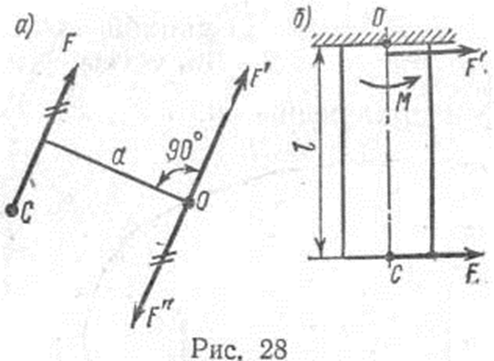
Возьмем силу F, приложенную в точке С. Требуется перенести эту силу параллельно самой себе в некоторую точку О. Приложимв точке О две силы F' и F", противоположно направленные, равные по значению и параллельные заданной силе F, т. е. F' = F" = F. От приложения в точке О этих сил состояние тела не изменяется, так как они взаимно уравновешиваются. Полученную систему трех сил можно рассматривать как состоящую из силы F', приложенной в точке О, и пары сил FF" с моментом М = Fa. Эту пару сил называют присоединенной, а ее плечо а равно плечу силы F относительно точки О.
Таким образом, при приведении силы F к точке, не лежащей на линии действия силы, получается эквивалентная система, состоящая из силы, такой же по модулю и направлению, как и сила F, и присоединенной пары сил, момент которой равен моменту данной силы относительно точки приведения:
В качестве примера приведения силы рассмотрим действие силы F на конец С защемленного стержня (рис.28,б). После приведения силы F в точку О защемленного сечения обнаруживаем в нем силу F1 равную и параллельную заданной, и присоединенный момент М, равный моменту заданной силы F относительно точки приведения О

Балочные системы.
Балка – это конструктивная деталь в виде прямого бруса, закрепленного на опорах, и изгибаемая приложенными к ней силами.
Высота сечения балки незначительна по сравнению с ее длиной.
Виды нагрузок. По способу приложения нагрузки делятся на сосредоточенные и распределенные. Если реально передача нагрузки происходит на пренебрежимо малой площадке (в точке), нагрузка называется сосредоточенной.
Если нагрузка распределена по значительной площадке или линии (давление воды на плотину, снега на крышу и т. д.), то она является распределенной.
Жесткая заделка (защемление). Опора не допускает перемещений и поворотов. Заделку заменяют двумя составляющими силы RАх и RАу и парой моментов МR.
Шарнирно-подвижная опора. Опора допускает поворот вокруг шарнира и перемещение вдоль опорной поверхности.
Шарнирно-неподвижная опора. Опора допускает поворот вокруг шарнира и может быть заменена двумя составляющими силы вдоль осей координат.
Неизвестны три силы, две из них – вертикальные, следовательно, для определения неизвестных следует использовать систему уравнений во второй форме:

Составляются уравнения моментов относительно точки крепления балки. Поскольку момент силы, проходящей через точку крепления, равен 0, в уравнении остается одна неизвестная сила.
Из уравнения (3) определяется реакция RВх.
Из уравнения (1) определяется реакция RВу.
Из уравнения (2) определяется реакция RАу.
Для контроля правильности решения используется дополнительное уравнение:

При равновесии твердого тела, где можно выбрать три точки, не лежащие на одной прямой, используется система уравнений в третьей форме.
Понятие о силе трения.
Трение — сопротивление, возникающее при движении одного шероховатого тела по поверхности другого. При скольжении тел возникает трение скольжения, при качении — трение качения. Природа сопротивлений движению в разных случаях различна.
Трение скольжения
Причина — механическое зацепление выступов. Сила сопротивления движению при скольжении называется силой трения скольжения (рис. 13.3а).
Законы трения скольжения:
Сила трения скольжения прямо пропорциональна силе нормального давления:

Где

сила нормального давления, направлена перпендикулярно опорной поверхности;
 — коэффициент трения скольжения.
— коэффициент трения скольжения.
В случае движения тела по наклонной плоскости (рис. 13.36)
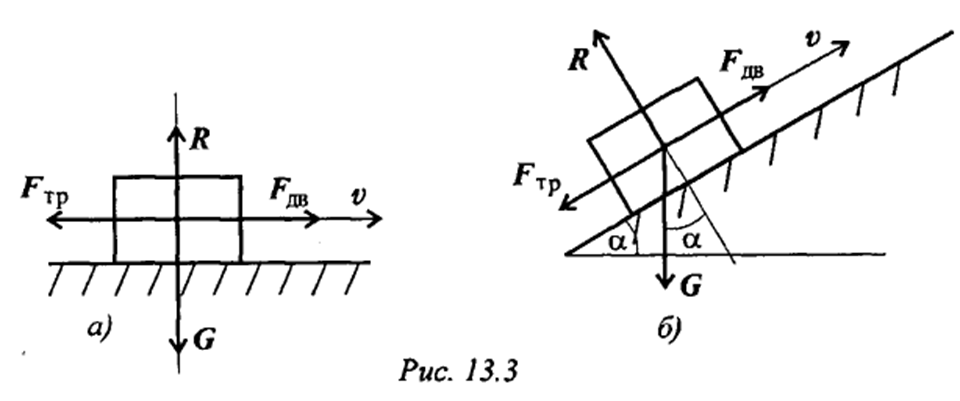
В случае движения тела по наклонной плоскости (рис. 13.36)
где  — угол наклона
плоскости к горизонту.
— угол наклона
плоскости к горизонту.
Сила трения всегда направлена в сторону, обратную направлению движения.
Сила трения меняется от нуля до некоторого максимального значения, называемого силой трения покоя (статическое трение):

статическая сила трения (сила трения покоя).
Сила трения при движении меньше силы трения покоя. Сил трения при движении называется динамической силой трения
Поскольку сила нормального давления, зависящая от веса и направления опорной поверхности, не меняется, то различают статический и динамический коэффициенты трения:

Коэффициент трения скольжения зависит от следующих факторов:
— от материала: материалы делятся на фрикционные (с большим коэффициентом трения) и антифрикционные (с малым коэффициентом трения), например
(при скольжении стали но стали всухую),

при скольжении стали по текстолиту)
— от наличия смазки, например
(при скольжении стали
по стали со сметкой); 
— от скорости взаимного перемещения.
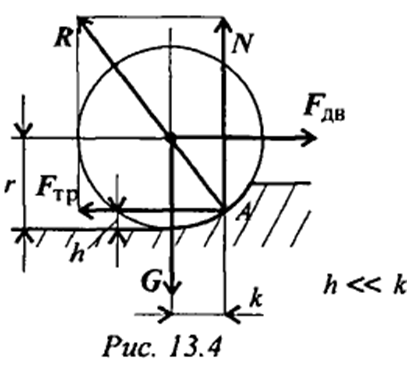
Трение качения
Сопротивление при качении связано с взаимной деформацией грунта и колеса и значительно меньше трения скольжения.
Обычно считают грунт мягче колеса, тогда в основном деформируется грунт, и в каждый момент колесо должно перекатываться через выступ грунта. Для равномерного качения колеса необходимо прикладывать силуУсловие качения колеса состоит в том, что движущийся момент должен быть не меньше момента сопротивления:
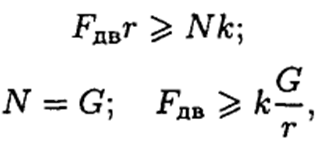
где

максимальное значение плеча (половина колеи) принимается за коэффициент трения качения, размерность — сантиметры.
Ориентировочные значения (определяются
экспериментально): сталь по стали —
(определяются
экспериментально): сталь по стали —  резиновая
шина по шоссе —
резиновая
шина по шоссе —